
-----
 Voici mon premier robot digne de ce nom: un traditionnel suiveur de ligne basé sur l'Arduino. Vous indiquez la trajectoire à suivre au moyen de ruban gommé noir sur un plancher pâle, et le robot suit docilement le parcours indiqué, à une impressionnante vitesse de croisière de 3 cm par seconde...
Voici mon premier robot digne de ce nom: un traditionnel suiveur de ligne basé sur l'Arduino. Vous indiquez la trajectoire à suivre au moyen de ruban gommé noir sur un plancher pâle, et le robot suit docilement le parcours indiqué, à une impressionnante vitesse de croisière de 3 cm par seconde...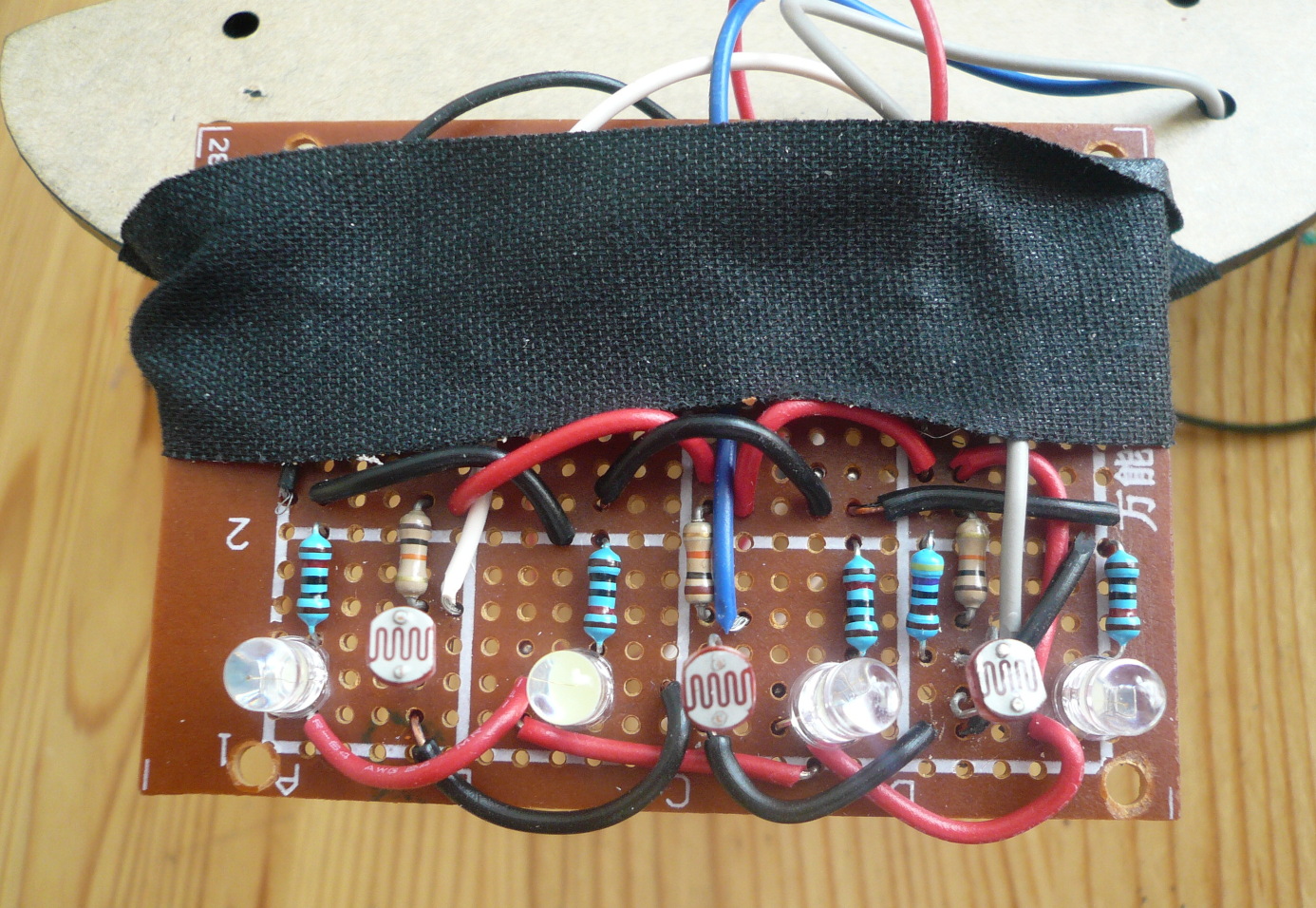
Puisque la base de robot et le pilote du moteur étaient déjà construits, la tâche principale consistait à construire le capteur. Placé à l'avant du robot, face vers le plancher, le capteur est constitué de 4 diodes électroluminescentes (LED) et de 3 photorésistances (LDR). Les photorésistances, reliées en diviseur de tension à une résistance fixe, reçoivent la lumière des LEDs réfléchie par le plancher. Le ruban noir réfléchit beaucoup moins de lumière, ce qui modifie le voltage aux bornes de la photorésistance. Ce voltage est acheminé aux entrées analogiques 0, 1 et 2 de l'Arduino.
J'ai mal planifié la disposition des composants: en inversant le sens des LEDs, j'aurais économisé beaucoup de fil... De plus, je n'avais pas remarqué qu'une des photorésistances présentait des caractéristiques très différentes des deux autres; par conséquent, son voltage variait très peu lors d'un changement d'éclairement (le robot refusait de tourner à droite!): la réduction de l'autre résistance du diviseur de tension a permis de régler ce problème (j'ai ajouté une autre résistance en parallèle).
 Côté programmation, nul besoin de réinventer la roue: j'ai utilisé le sketch présenté par Michael McRobert dans son livre "Beginning Arduino": ce sketch peut être téléchargé gratuitement sur le site web de l'éditeur (c'est le projet numéro 30).
Côté programmation, nul besoin de réinventer la roue: j'ai utilisé le sketch présenté par Michael McRobert dans son livre "Beginning Arduino": ce sketch peut être téléchargé gratuitement sur le site web de l'éditeur (c'est le projet numéro 30).Yves Pelletier (Twitter: @ElectroAmateur)
bonsoir !! svp est ce que c'est possible de montrer le montage que vous avez effectuer parceque je veut integrer celui si au robot eviteur d'obstacle 1.0! mercii a vous
RépondreSupprimersvp le shema de branchement svp
RépondreSupprimer