
Ce projet consiste à afficher à l'écran d'un ordinateur un graphique cartésien qui montre les données transmises par un Raspberry Pi Pico branché à un de ses ports USB (il s'agit d'un projet similaire à celui que j'avais réalisé il y a quelques années avec un Arduino).

Les donnés sont acheminées du Raspberry Pi Pico à l'ordinateur par une communication série à travers le câble USB. Le Raspberry Pi Pico est programmé en MicroPython, alors que l'ordinateur affichant le graphique exécute un script en Python en utilisant la bibliothèque Matplotlib.
Circuit
Pour faire mes tests, j'ai utilisé un potentiomètre branché à la broche GP26 du Raspberry Pi Pico. Il sera facile de modifier le script pour remplacer le potentiomètre par un capteur de votre choix.

Script en Micropython exécuté par le Raspberry Pi Pico
Le rôle du Raspberry Pi Pico se résume à peu de chose. D'abord, il doit vérifier s'il reçoit un message en provenance de l'ordinateur. Si c'est le cas, il doit envoyer à l'ordinateur la mesure du capteur ainsi que le moment où cette mesure a été prise.
L'envoi de données du Raspberry Pi Pico vers l'ordinateur se fait tout simplement par la commande "print()".
La réception d'un message série par le port USB est un peu plus compliquée et, surtout, moins intuitive. Il s'agit des lignes 20, 21, 24 et 25 du script (ça nécessite également l'inclusion des bibliothèques sys et select):
poll = select.poll()poll.register(sys.stdin, select.POLLIN)res = poll.poll()mess = res[0][0].read(1)
-
-
Script en Python exécuté par l'ordinateur auquel est branché le Raspberry Pi Pico
Sur l'ordinateur hôte, le script est plus élaboré. Si ce n'est pas déjà fait, il faut d'abord installer la bibliothèque Matplotlib , qui prend en charge le tracé du graphique (si vous utilisez Thonny, l'installation est très facile en passant par le menu "Outil - Gérer les plugin..."). La méthode FuncAnimation() permettra une mise à jour régulière du graphique en y ajoutant de nouvelles mesures.
Le script cherche d'abord un port série disponible, et il s'y branche s'il n'en trouve qu'un seul (il demande à l'utilisateur de faire un choix s'il en trouve plusieurs). L'utilisateur doit ensuite choisir le nombre de secondes qui s'écouleront entre deux mesures consécutives.


-
-
Astuce: exécution des deux scripts avec Thonny
Il est possible d'exécuter les deux scripts en utilisant Thonny, sans que Thonny n'intercepte les messages envoyés par le Raspberry Pi Pico. Voici comment j'ai procédé:
- J'ai d'abord exécuté le script sur le Pico au moyen de Thonny, en utilisant l'interpréteur Micropython approprié.
- J'ai ensuite sélectionné le menu "Exécuter - Déconnecter" sur Thonny. Cette action a pour effet d'interrompre les communications entre Thonny et le Raspberry Pi Pico, mais elle n'interrompt pas le script, qui continue son exécution de façon autonome.
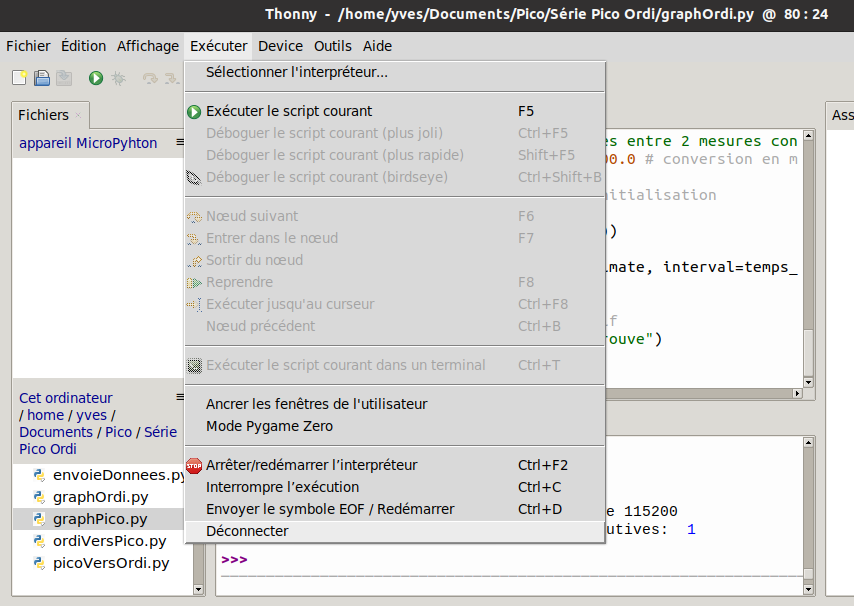
- Finalement, j'ai changé d'interpréteur (menu "Exécuter - Sélectionner l'interpréteur...") et j'ai exécuté le deuxième script directement sur le PC.

Il existe d'autres options possibles, comme installer le premier script dans le Pico en le nommant "main.py" pour qu'il s'exécute automatiquement.
À lire également:
- Programmer le Raspberry Pi Pico en Micropython avec Thonny
- Graphique en temps réel des mesures prises par un Arduino
- Mesurer la température et l'humidité relative avec un DHT22 et un Raspberry Pi Pico
Yves Pelletier (Facebook)
Aucun commentaire:
Enregistrer un commentaire